Si U (volts) est la tension nominale de la batterie et C(Ampèresheures) est sa capacité nominale, la durée T (heures) de décharge sera :
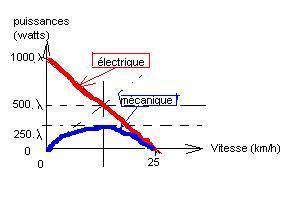
La puissance électrique We (watts) consommée est fonction de la vitesse V comprise entre 0 et 25 km/h, et de la position de la commande λ comprise entre 0 et 1; du variateur de puissance.
. . . . . We = 1000 λ ( 1 - V / 25 )
En effet, au fur et à mesure que le moteur tourne apparait une tension contre électromotrice qui s'oppose au passage du courant dans les bobinages du moteur et compense totalement celle-ci à la vitesse maximale autorisée pour l'assistance, soit 25 km/h.
Le couple mécanique du moteur étant proportionnel au courant qui passe dans les bobinages,la puissance mécanique Wm (watts) du moteur, produit de la vitesse de rotation par le couple, sera donc de la forme :
. . . . . Wm = 1000 λ ( 1 - V / 25 ) V / 25
Si U (volts) est la tension nominale de la batterie et C(Ampèresheures) est sa capacité nominale, la durée T (heures) de décharge sera :
. . . . . T = U C / We
et l'autonomie en kilomètres du vélo électrique légal sera donc :
. . . . . X = T V = U C V / We
La puissance mécanique Wm est consommée par les résistances au roulement, la variation du potentiel gravitationnel par changements d'altitude (côtes, descentes) qui demandent une puissance mécanique proportionnelle à la vitesse, et la résistance aérodynamique qui demande (ou fournit en cas de vent arrière supérieur à la vitesse de roulement) une puissance proportionnelle au cube de la vitesse relative par rapport au vent, tandis que le pédalage musculaire peut au contraire fournir une puissance additionnelle au moteur électrique.
En ne tenant compte pour simplifier que de la résistance due à la pente du terrain, la puissance de 250 watts permettra à une masse de 100 kgs, soit un poids de 1000 N, de monter verticalement à la vitesse 0.25 m/s qui ,rapporté à la vitesse de déplacement de 12.5 km/h, soit 3.5 m/s correspond à une pente de 7%.
La batterie de 36 volts de capacité 10 ampèresheures ne sera déchargée (500 watts électriques )qu'au bout de 0.7 heure, donc une autonomie de 9 km.
Dès que la pente augmentera la vitesse s'équilibrera à une valeur inférieure à 12.5 km/h, et le vélo commencera à reculer à partir d'une pente de 14%.
Par contre si la pente n'est que de 3 % la vitesse atteindra 18 km/h, la puissance électrique sera réduite à 200 watts environ, et l'autonomie atteindra alors 32 km. environ.
L'assistance électrique peut-être utilisée à "bas-régime", c'est à dire pour soulager l'effort dans les montée, ou à "haut régime" pour augmenter la vitesse sans augmenter l'effort sur le plat.
On peut tenir compte de la puissance de pédalage, par exemple ajouter 100 watts à la puissance mécanique, étudier l'influence de la commande λ du variateur de puissance électrique, et surtout de la résistance aérodynamique proportionnelle au carré de la vitesse, qui ajoutera donc une puissance mécanique consommée (proportionnele au cube de la vitesse V )de :
. . . . Wa = α . V . V . V
Pour évaluer le coefficient α on peut partir des données de chute libre qui indiquent environ 150 km/h pour le corps humain sans parachute, soit 40 m/s avec un poids de 700 N , donc un coefficient de trainée α de 700/1600 = 0.43 qui consommerait une puissance de 144 watts à la vitesse de 25 km/h.
La puissance consommée par la trainée aérodynamique variant comme le cube de la vitesse on peut la négliger aux faibles vitesses mais il y aurait lieu d'en tenir compte dans la zone des vitesses supérieures, ainsi que pour étudier l'influence du vent,qui peut atteindre souvent plus de 3 m/s, soit environ 10 km/h.,et qui s'ajoute ou se retranche, selon sa direction, à la vitesse de roulement pour le calcul de la pussance mécanique consommée par la résistance de l'air.
Monter une côte de 10% avec un poids de 100 kgs(soit 981 Neutons) à la vitesse de 10 km/h (soit 2.77 m/s) consommera une puissance de 272 watts.
Pour une même distance parcourue la consommation d'énergie est donc 4 à 5 fois plus élevée en côte (pente 10%) que sur le plat. Il est donc rentable, lorsque les côtes ne sont pas trop nombreuses et pas trop longues, de limiter l'usage de l'appoint électrique en côte pour gagner de l'autonomie sur le plat, c'est à dire utiliser le plus possible l'énergie musculaire en côte, puisque, contrairement à l'énergie électrique de la batterie, elle a la particularité de s'autoregénerer par le repos consécutif à l'effort.Ceci n'est bien entendu possible qu'à la condition que l'assistance électrique n'augmente pas de façon importante le poids du vélo, d'où l'intérêt des batteries modernes (2 kgs) plus légères que les batteries au plomb (15 kgs) et des moteurs moyeux qui, bien que plus lourds que les moteurs rapides regagnent le poids et le rendement des dispositifs mécaniques de réduction et de transmission (engrenages, courroies, chaines etc...).
Les moteurs pédaliers ont l'avantage de travailler à vitesse constante, aussi bien en côte que sur le plat, puisqu'ils bénéficient du rapport variable de la transmission par chaine(avec dérailleur ou train épicycloïdal type Nexus), mais au prix d'une usure de la chaine et des pignons ainsi que d'une perte de rendement mécanique et d'un cumul sur les efforts des rayons de la roue arrière (sur lesquels s'ajoutent les efforts musculaires et les efforts électriques), contrairement au moteur moyeu dans la roue avant pour lesquels les rayons avant transmettent la puissance électrique et les rayons arrière la puissance musculaire.