Simulez votre vélo électrique en trois phases :
1-Phase de pédalage non assisté tant que la puissance exigée par la vitesse ne dépasse pas la puissance musculaire en accélération.
2-Phase d'assistance en accélération jusqu'à ce que la vitesse atteigne la valeur désirée de fin d'accélération (ou que le taux de pwm nécessaire atteigne les 100%).
3-Phase de croisière avec une puissance musculaire réduite et une accélération faible, jusqu'à ce que le taux de pwm atteigne 100%.
Modifier les données du formulaire puis cliquer sur un bouton "voir les courbes"
Pour modifier les données et faire un nouveau calcul fermer la fenêtre du graphique, ce qui a pour effet d'effacer le graphe actuel et ramène à la page du formulaire (Testé avec internet explorer 7).En cas de difficulté avec d'autres navigateurs vider le cache afin d'éliminer le graphe déjà calculé de la mémoire ordinateur.
Utilisation d'un moteur au-delà de sa puissance nominale continue maximale.
Lorsqu'il fonctionne au régime nominal et à la puissance nominale continue maximale, le moteur est en général à son point de meilleur rendement, environ 90% et il évacue donc 10% de sa puissance en chaleur : Par exemple si la puissance nominale continue est de 250 watts, le moteur est capable d'évacuer pendant une durée infinie une puissance de 25 watts.
Le point sensible du moteur à l'échauffement, par exemple le vernis qui isole les spires de cuivre les unes par rapport aux autres, est alors à la température maximale qu'il peut supporter.
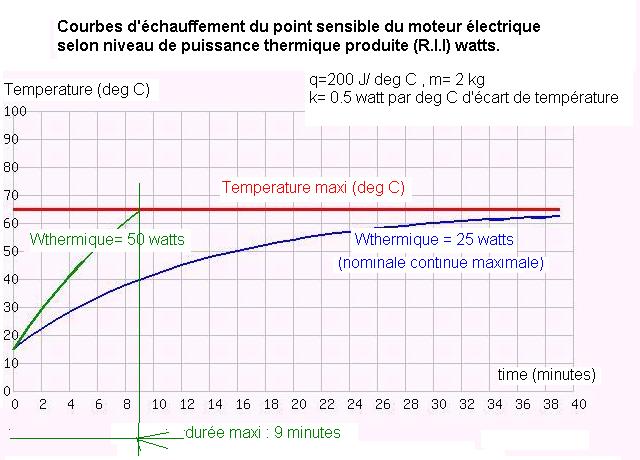
Lorsque le moteur recoit une puissance thermique donnée et qu'il est dans un environnement de température normale (15 degC), la température du point sensible se stabilise au bout d'un temps infini à une valeur d'équilibre qui est proportionnelle à la puissance reçue et s'établit progressivement selon une loi exponentielle dont la constante de temps dépend de l'isolation du moteur et de ses capacités d'évacuation des calories à l'extérieur.
Une idée de la valeur de cette constante de temps est donnée par le temps que met le moteur à perdre les deux tiers de son excès de température par rapport à la température ambiante.
Par exemple un moteur dont les bobinages ont atteint une température de 100 degC et qui retrouve une température de 15+(100-15)/3=45 deg au bout de dix minutes aura une constante de temps thermique de 10 minutes.
Le moteur qui évacue la puissance thermique Wl lorsqu'il est à la température Tl montera donc en température selon la loi :
T/Tl=W/Wl*(1-exp(t/tau)) lorsqu'il sera soumis à l'apport de puissance thermique W, et s'il a une constante de temps thermique qui vaut tau.
La durée limite T pendant laquelle il pourra fonctionner avec apport de la puissance W>Wl vaudra donc :
T/tau = Log (1/(1-W/Wl))

Sur la courbe représentative de cette fonction, on voit qu'un moteur qui dissipe en continu une puissance de 25 watts et qui a une constante de temps thermique de dix minutes pourra fonctionner pendant 2 minutes avec une puissance thermique apportée six fois plus élevée que les 25 watts qu'il évacue indéfiniment quand il est à sa puissance nominale de 250 watts, et pendant quatre minutes en supportant une puissance thermique de trois fois celle évacuée à puissance nominale continue max etc...
La puissance thermique produite par le moteur est proportionnelle à sa puissance mécanique et fonction de son rendement, qui est généralement dégradé quand il n'est pas à son point de fonctionnement nominal.
Par exemple un moteur de 250 watts de puissance nominale continue (évacuant alors 25 watts en chaleur si son rendement nominal est de 90%), et de constante de temps thermique de dix minutes, pourra fournir 500 watts pendant quatre minutes sans s'échauffer anormalement à condition que le rendement reste supérieur à (500-75)/500= 0.85 contre les (250-25)/250= 0.90 à son régime nominal continu.
Exemples de données pour quelques moteurs de cycles à pédalage assisté.
Pour une roue de 26" :
| moteur | K (V/kmh) | . . R : (Ω) . . | red (%) |
|
| Phantom | 0.77 | 0.46 | 100 | (ninecontinent100)
|
| Superphantom | 1.12 | 0.62 | 100 | (ninecontinent200)
|
| goldenmotor | 1 | 0.58 | 100
|
| crystalyte 408 | 0.78 | 0.93 | 100
|
| crystalyte 409 | 0.89 | 1.06 | 100
|
| crystalyte 406 | 0.56 | 0.66 | 100
|
| crystalyte 4011 | 1.18 | 2.14 | 100
|
| greencity madrid | 1.7 | 0.9 | 95
|
| panasonic zapping | 1 | 0.3 | 90 | [10/20 kmh]
|
Interprétation des courbes :
consommation d'énergie électrique au km (wh/km).
La consommation électrique du véhicule s'exprime traditionnellement en wattheures dépensé sur la batterie par kilomètre parcouru : Une batterie de tension Un (volts) et de capacité C (Ah) sera (en principe) capable de délivrer une quantité d'énergie de U.C wattsheures, ou encore une puissance U.C watts pendant une heure.
L'autonomie du véhicule (en kilomètres) s'obtient en divisant la quantité d'énergie disponible dans la batterie (en wattheures) par la consommation kilomètrique du véhicule exprimée en wh/km : Une batterie de 36 volts de tension et de 10 ampèresheures (ah) de capacité contient une énergie de 360 wattheures qui lui permettra d'alimenter pendant 36 kilomètres un véhicule consommant 10 wattheures au kilomètre (wh/km).
Dans la pratique, les batteries ont une capacité "réelle en utilisation" qui s'effrite avec le temps et l'utilisation (nombre de cycles de charge et décharge), et qui diminue en fonction du niveau de courant débité (les capacités nominales sont indiquées pour une décharge lente), et lorsque la température diminue. Cette altération dépend du type de batteries, elles était très sensible sur les batteries plomb-gel, moins sur les batteries ni-mh et les nouvelles batteries au lithium et cathode au phosphate de fer "micronisé" concues pour les cycles de charge et décharge rapides peuvent avoir des capacités "réelles" approchant les capacités nominales indiquées par leurs constructeurs.
Taux de pwm (pulse width modulation):
Le controleur pwm hache le courant de batterie à haute fréquence selon un rapport cyclique (proportion entre les durées de passage du courant et les durées d'interruption) qui est commandable par une poignée ou une fonction des signaux de capteurs de vitesse de pédalage (Pedal Assisting System).
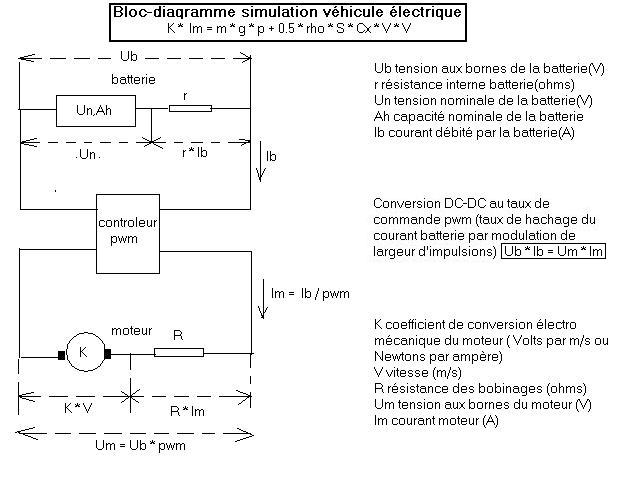
L'effet est le même que celui d'un convertisseur de tension dc-dc interposé entre la batterie et le moteur : La tension moteur est égale à la tension batterie multipliée par le rapport de pwm tandis que le courant batterie moyen est égal au courant moteur multiplié par ce même rapport de pwm.
Certains cycles à pédalage assisté sont dépourvus de controleurs pwm continus : Le moteur est alimenté directement par la batterie et déconnecté par l'arrêt du pédalage : cette régulation à basse fréquence commandée par le cycliste lui-même est beaucoup plus énergivore à l'accélération que la régulation continue et automatique par pwm.
Elle est toutefois appréciée de certains utilisateurs par l'aide qu'elle procure au cycliste en accélération et qui lui permet de compenser par le pédalage l'énergie de chaleur perdue dans les résistances : Le cycliste se trouvant plus rapidement à une vitesse d'efficacité de son pédalage musculaire et à la vitesse de croisière il fournit plus d'énergie musculaire et finalement les autonomies des cycles avec ou sans pwm sont souvent comparables.D'autres trouveront peu agréable la nécessité de constamment interrompre le pédalage en croisière pour réguler la vitesse du vélo et lui préfèreront la pwm continue.
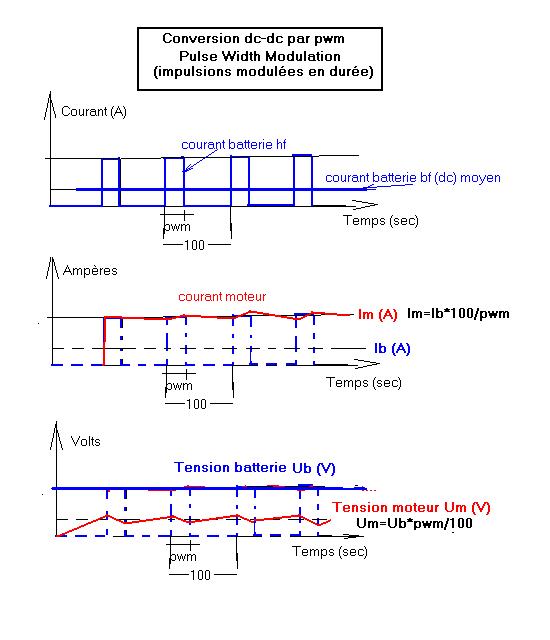
Le taux de pwm (courbe bleue), compris entre 0 et 100%, permet de connaitre la tension appliquée aux bornes du moteur après la conversion de tension dc-dc (courant continu à courant continu): par exemple si le taux de pwm est de 50% et la tension de la batterie de 48 volts , la tension moteur sera de 24 volts, qui pourrait aussi bien être obtenue avec une batterie de tension 24 volts et un taux de pwm de 100%.
Courant batterie
La courbe rouge donne l'évolution du courant "haché" moyenné qui sort de la batterie, exprimé en Ampères.Ce courant est mesuré par les ampèremètres qui sont placés en sortie d'une borne de la batterie (cycle analyst, watts up) et certains de ces ampèremètres peuvent commander le taux de pwm qui correspond à une valeur de courant désirée : si le cycle analyst constate que le courant de batterie dépasse une valeur de consigne il agit sur le taux de hachage du courant pour le diminuer.
Le courant qui circule dans les bobines du moteur et qui, lui, n'est pas "haché" en raison de l'effet d'inertie des bobines et de la présence d'une diode de roue libre aux bornes du moteur, est égal au courant de batterie divisé par le taux de pwm : Un courant de batterie de 5 ampères au taux de pwm (courbe bleue) de 50% correspondra à un courant moteur de 10 ampères, alors que quand le taux de pwm avoisine les 100%, courant de batterie moyen et courant moteur sont pratiquemet égaux.
Rendement de la propulsion électrique (%)
Le courant de batterie moyen circulant dans sa résistance interne r "gaspille" une partie de la puissance électrique en chaleur par effet "Joule", puissance gaspillée proportionnelle à la résistance r et au carré de l'intensité du courant de batterie; De même le courant qui circule dans les bobines du moteur se traduit par un gaspillage de pussance en chaleur proportionnel à la résistance R(ohms) et au carré du courant moteur.
Le rendement de la propulsion électrique ne peut donc atteindre les 100% que si les résistances sont nulles (ce qui n'est possible qu'au voisinage du zéro absolu de température -273 degC - car la résistance électrique d'un matériau augmente avec sa température), ou bien si les courants sont nuls (lorsque le moteur tourne "à vide" sans aucune résistance mécanique), auquel cas il ne fournit pas de puissance mécanique ce qui le rend inutile bien qu'ayant un rendement de conversion électro-mécanique de 100%.
Le moteur est à son point de fonctionnement "nominal" lorsqu'il tourne assez vite pour avoir un bon rendement, et assez lentement pour admettre un courant suffisant, sans pour celà conduire à un échauffement excessif pendant la durée prévue pour son utilisation : Quand cette durée est suffisamment longue (30 minutes) ces impératifs définissent la "puissance maximale continue" du moteur à laquelle les législations font référence.
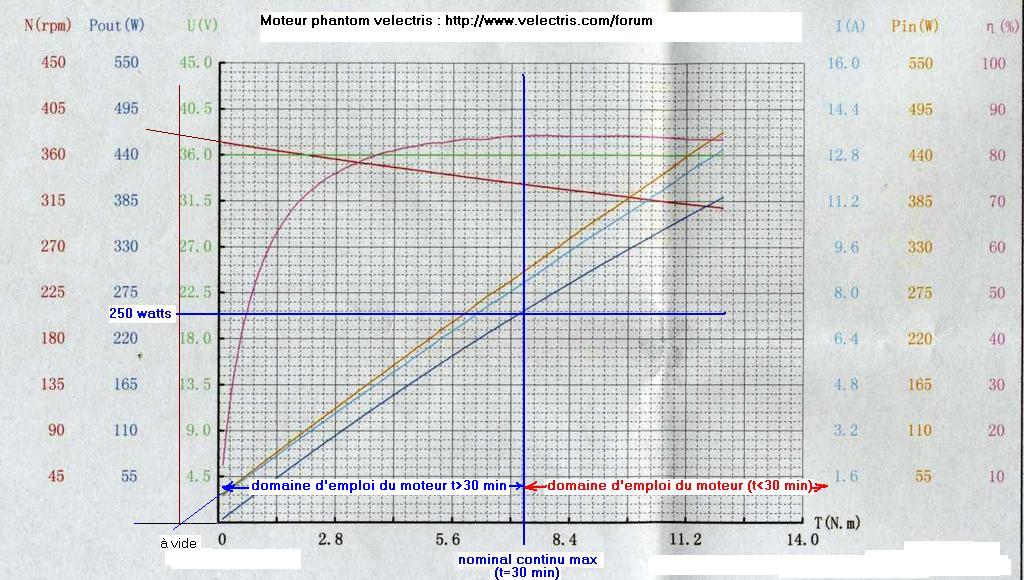
On voit que lorsque le taux de pwm = 100% (tension moteur = tension batterie),le moteur de cycle à pédalage assisté fournit toujours une puissance supérieure à sa puissance nominale continue maximale autorisée, puisqu'il n'a jamais besoin de fonctionner sans interruption pendant un temps infini (le cycliste serait fatigué !) : en pratique une durée supérieure à 30 minutes est considérée comme infinie.
Puissance totale consommée
La courbe noire représente la puissance mécanique de propulsion nécessaire pour assurer la propulsion du véhicule à la vitesse V : Elle est la somme de la puissance musculaire de pédalage (courbe grise) et de la puissance mécanique fournie par le moteur (fixée par la législation à 250 watts en Europe ou 180 watts au Japon, Amérique du Nord et certaines provinces de Chine, en régime "continu") .
Cette puissance mécanique fournie par le moteur se lit sur le graphe en faisant la différence entre la puissance de pédalage musculaire (courbe grise) et la courbe de puissance totale (courbe noire, en watts, echelle de droite).
En régime de croisière, c'est à dire sous faible accélération en régime "continu" de longue durée, elle ne devrait pas dépasser les limites des législations, mais on peut voir sur les courbes qu'en régime d'accélération ou lors d'une passage d'une forte pente
, cette puissance dépasse généralement, parfois du double ou plus, les limites autorisées en régime continu.
Pour information extrait du programme php de la simulation (partie boucle de calcul):
# boucle de calcul
$fin=0;$acc=1;
imagesetthickness($im,3);
$xm=$ox;$ym=$oy;
$itm=$oy;$ctm=$oy;$I=0;
for($i=0;$i<$incal;$i++)
{
$zm=$oy-$py*$pdal/$nuy/$dix;$Vkmh=$i;$V=$Vkmh/3.6;
if($Vkmh>$vfac or $pwm > 1) {$p=($pr+$ptr)/100;$pdal=$pdalc;$acc=0;}# fin accél
$F=$m*$g*$p+$rs2scx*($V+$vv)*($V+$vv);
$wmc=$F*$V;#puissance mécanique totale de propulsion
$xt=$ox+$px*$Vkmh/$nux;
$yt=$oy-$py*$wmc/$nuy/$dix;
#if($wmc<$pdal and $acc>0.5 ) # pédalage seul
if($wmc<$pdal) # pédalage seul
{
imageline($im,$xm,$ym,$xt,$yt,$gris);$ym=$yt;$xm=$xt;
$utm=$K*$V;$utm=$oy-$utm*$py/$nuy;$wtm=$oy-$py*$pdal/$nuy/$dix;
$rtm=$oy-$py*100/$nuy;
}
else #76 mise en route assistance
{
if($fin<0.5)
{
$I=($wmc-$pdal)/$V/$K;
$U=$K*$V+$R*$I;
$W=$I*$U;
$pwm=($Un-sqrt($Un*$Un-4*$r*$U*$I))/(2*$r*$I);#135
$Ub=$U/$pwm;$Ib=$I*$pwm;
$ren=($wmc-$pdal)/$Un/$Ib*100;
$Cs=$Un*$Ib/$Vkmh;
if($pwm <1.1)
{
$it=$oy-$py*$Ib/$nuy;
$ut=$oy-$py*$pwm*100/$nuy;
$wt=$oy-$py*$wmc/$nuy/$dix;
$ct=$oy-$py*$Cs/$nuy;
$rt=$oy-$py*$ren/$nuy;
imageline($im,$xm,$zm,$xt,$zm,$gris);#147
imageline($im,$xm,$itm,$xt,$it,$rouge);$itm=$it;
imageline($im,$xm,$utm,$xt,$ut,$bleu);$utm=$ut;
imageline($im,$xm,$wtm,$xt,$wt,$noir);$wtm=$wt;
imageline($im,$xm,$ctm,$xt,$ct,$vert);$ctm=$ct;
imageline($im,$xm,$rtm,$xt,$rt,$marron);$rtm=$rt;
$xm=$xt;
}#trace
else {$fin=1;}
}#pwm<1.1
}#assistance
}#boucle de calcul
programme php complet sur ce lien
le source de cette page html est accessible par "afficher le source" de votre navigateur.
Calculs d'échauffement du moteur :
Une masse M d'un matériau de chaleur spécifique q recevant une quantité d'énergie E joules accroit sa température de E/(m.q). Par exemple 1 kg d'eau de chaleur spécifique q=4.18 KJ/kg/degC demande une quantité d'énergie de 4180 Joules pour élever sa température de 1 degré C.
Un corps maintenu à une température Ti supérieure à la température Te du milieu ambiant lui cède chaque seconde une quantité de chaleur proportionnelle à la différence des températures (Ti-Te).
L'apport d'énergie thermique par l'effet Joule du courant I(ampères) qui circule dans les bobines du moteur de résistance ohmique R (ohms) se répartit donc en énergie d'échauffement de ces bobines et en énergie cédée par refroidissement du moteur au milieu extérieur :
(1) R.I.I.dt = q.M.dTi + k.(Ti-Te)
Par exemple un moteur qui dégage 25 watts par effet Joule à sa puissance nominale continue de 250 watts mécaniques (soit un rendement du moteur de 90%) se stabilisera en température (au bout d'un temps infini) à 100 degrés (température maximale supportable par les isolants sans détérioraton) dans un air ambiant à 15 degC, soit :
k=25/85=0.3 watts/degC.
Si le moteur est assimilable par exemple à une masse de 2 kg d'aluminium de chaleur spécifique 200 Joules par kg et par degC, soit M.q= 400 , la constante de temps thermique du moteur sera:
Th=q.M/k=400/0.3= 1360 sec = 23 minutes.
Inversement un moteur de constante de temps de refroidissement Th minutes aura un produit q.M = 60.Th.k avec ;
k=(1-rend)*pnom/(Tmax-Tair), rapport de la puissance nominale continue maximale multipliée par le complément à 1 du rendement moteur nominal et divisée par la différence entre la température maximale admissible dans le moteur et la température extérieure.
Les données de la simulation seront donc :
Puissance nominale continue maximale du moteur en watts : Wnom(watts)
rendement nominal du moteur renom (%)
Température maximale supportable par le moteur en degC : Tmpmax(degC)
Température de l'air autour du moteur : Tair (degC)
Constante de temps thermique du moteur :them (minutes)
Pendant la phase d'accélération la température du moteur sera calculée en intégrant l'équation différentielle du premier ordre (1), et pendant la phase de croisière on calculera la durée dmax (minutes) admissible avant que la température du moteur ne dépasse la valeur maximale autorisée sans dégradation irréversible Tmpmax :
dmax=them*log(x/(1-x)) avec :
x=R*I*I/(Wnom-Wnom*rnom/100), rapport entre la puissance thermique apportée au moteur par effet Joule et la puissance thermique apportée lorsque la puissance mécanique est la puissance nominale continue maximale du moteur.
Nota : En toute rigueur le coefficient k de refroidissement évolue comme la vitesse du moteur par rapport à l'air par effet de ventilation, mais par souci de simplification il n'en n'est pas tenu compte dans la simulation.